|
|
void | Publish () |
| | Publish all marker array topics_ that need publishing.
|
| |
| void | Visualize (std::string name, b2Body *body, float r, float g, float b, float a) |
| | Visualize body. More...
|
| |
| void | Visualize (std::string name, b2Joint *joint, float r, float g, float b, float a) |
| | Visualize body. More...
|
| |
| void | VisualizeLayer (std::string name, Body *body) |
| | Visualize a layer in 2.5d. More...
|
| |
| void | Reset (std::string name) |
| | Remove all elements in a visualization topic. More...
|
| |
| void | BodyToMarkers (visualization_msgs::MarkerArray &markers, b2Body *body, float r, float g, float b, float a) |
| | Append body as a marker on the marker array. More...
|
| |
| void | JointToMarkers (visualization_msgs::MarkerArray &markers, b2Joint *joint, float r, float g, float b, float a) |
| | Append a joint as a marker on the marker array. More...
|
| |
| void | AddTopicIfNotExist (const std::string &name) |
| | Ensure that a topic name is being broadcasted. More...
|
| |
|
void | PublishTopicList () |
| | Publish topics list.
|
| |
|
|
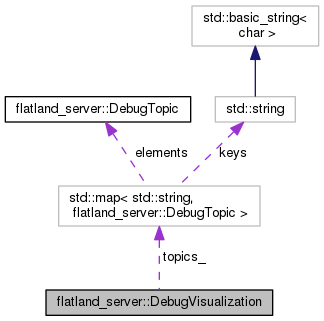
std::map< std::string, DebugTopic > | topics_ |
| |
|
ros::NodeHandle | node_ |
| |
|
ros::Publisher | topic_list_publisher_ |
| |
| void flatland_server::DebugVisualization::AddTopicIfNotExist |
( |
const std::string & |
name | ) |
|
Ensure that a topic name is being broadcasted.
- Parameters
-
| [in] | name | Name of the topic |
| void flatland_server::DebugVisualization::BodyToMarkers |
( |
visualization_msgs::MarkerArray & |
markers, |
|
|
b2Body * |
body, |
|
|
float |
r, |
|
|
float |
g, |
|
|
float |
b, |
|
|
float |
a |
|
) |
| |
Append body as a marker on the marker array.
- Parameters
-
| [in] | markers | The output marker array |
| [in] | body | The input body pointer |
| [in] | r | red color 0.0->1.0 |
| [in] | g | green color 0.0->1.0 |
| [in] | b | blue color 0.0->1.0 |
| [in] | a | alpha color 0.0->1.0 |
| void flatland_server::DebugVisualization::JointToMarkers |
( |
visualization_msgs::MarkerArray & |
markers, |
|
|
b2Joint * |
joint, |
|
|
float |
r, |
|
|
float |
g, |
|
|
float |
b, |
|
|
float |
a |
|
) |
| |
Append a joint as a marker on the marker array.
- Parameters
-
| [in] | markers | The output marker array |
| [in] | joint | The input joint pointer |
| [in] | r | red color 0.0->1.0 |
| [in] | g | green color 0.0->1.0 |
| [in] | b | blue color 0.0->1.0 |
| [in] | a | alpha color 0.0->1.0 |
| void flatland_server::DebugVisualization::Reset |
( |
std::string |
name | ) |
|
Remove all elements in a visualization topic.
- Parameters
-
| void flatland_server::DebugVisualization::Visualize |
( |
std::string |
name, |
|
|
b2Body * |
body, |
|
|
float |
r, |
|
|
float |
g, |
|
|
float |
b, |
|
|
float |
a |
|
) |
| |
Visualize body.
- Parameters
-
| [in] | name | The name of the topic |
| [in] | body | The body to output |
| [in] | r | red color 0.0->1.0 |
| [in] | g | green color 0.0->1.0 |
| [in] | b | blue color 0.0->1.0 |
| [in] | a | alpha color 0.0->1.0 |
| void flatland_server::DebugVisualization::Visualize |
( |
std::string |
name, |
|
|
b2Joint * |
joint, |
|
|
float |
r, |
|
|
float |
g, |
|
|
float |
b, |
|
|
float |
a |
|
) |
| |
Visualize body.
- Parameters
-
| [in] | name | The name of the topic |
| [in] | joint | The join to output |
| [in] | r | red color 0.0->1.0 |
| [in] | g | green color 0.0->1.0 |
| [in] | b | blue color 0.0->1.0 |
| [in] | a | alpha color 0.0->1.0 |
| void flatland_server::DebugVisualization::VisualizeLayer |
( |
std::string |
name, |
|
|
Body * |
body |
|
) |
| |
Visualize a layer in 2.5d.
- Parameters
-
| [in] | name | The name of the topic |
| [in] | joint | The join to output |
| [in] | r | red color 0.0->1.0 |
| [in] | g | green color 0.0->1.0 |
| [in] | b | blue color 0.0->1.0 |
| [in] | a | alpha color 0.0->1.0 |
The documentation for this class was generated from the following files:
- flatland_server/include/flatland_server/debug_visualization.h
- flatland_server/src/debug_visualization.cpp
 1.8.11
1.8.11

